After the first week has passed —I’m curious to see the robots you’ve all made, especially because I’ve seen a “brutal” Robocop today afternoon, after the Typography class!. So, the first results of the code drawings have started arriving and we will see a few tomorrow!
There is usually always a couple os student who discover that you can draw vectorially in Illustrator and “copy-paste” the coordinates of points/primitives into the processing code. This allows you to greatly speed up the drawing process (before discovering and using the Tweak Mode!).
But anyway, despite being more or less fast, in this class/challenge, you’ll be taken to the “limit” of despair of “find-and-replace” editing mode. What you’ve done in absolute coordinates, you’ll begin to slowly alter into relative coordinates. First with the “corner” of the robot’s reference point. But for the most ambitious, already with the center of coordinates (to later use with pushMatrix).
For a visual reference to show in the next class tomorrow, here are some examples from last year. Notice that some are regularly played out, but most can already implement some randomness and make decision (conditions) cycles (loops) to insert one or another robot into different positions or give them different drawings…
Ana Galician 
Bruna Guimarães 
Carolina Mayan 
Diana Gonçalves 
Diogo Sequeira 
Francisca Santos 
Hugo Costa 
Julia Valente 
Daisy Silva 
Monica Azevedo 
Pedro Costa 
Vasco Castro 
Yuliya Liberda
And it doesn’t stick around. Class 2 also developed spectacular solutions

Guilherme Maior 
Joana Coelho 
Joana Painter 
Mafalda Rocchi 
Mariana Antunes 
Marta Sousa 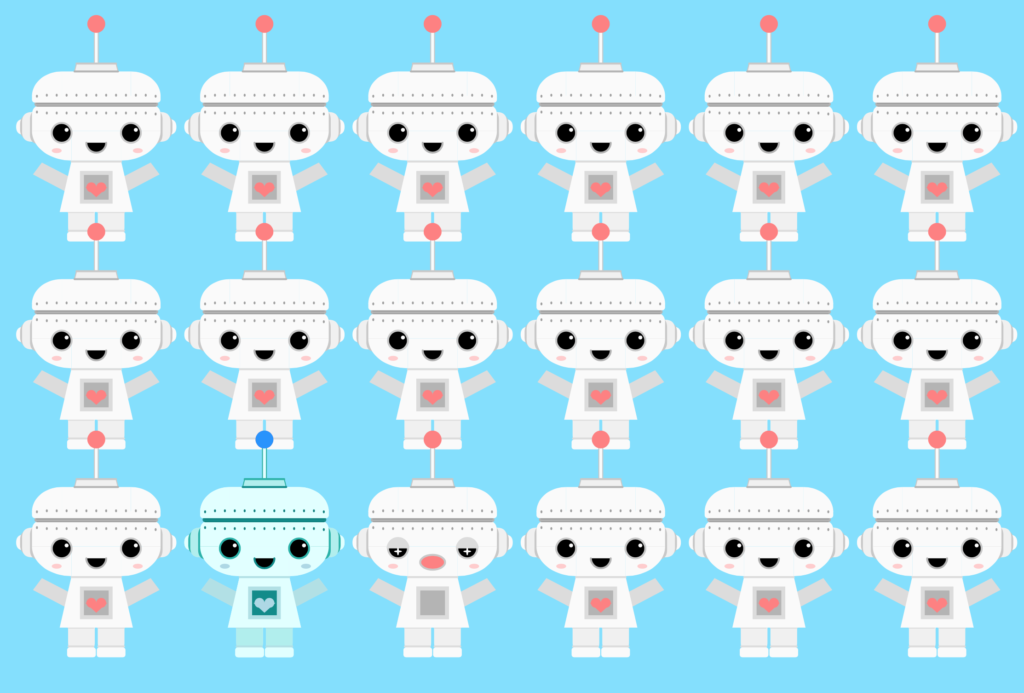
Matilde Ferreira 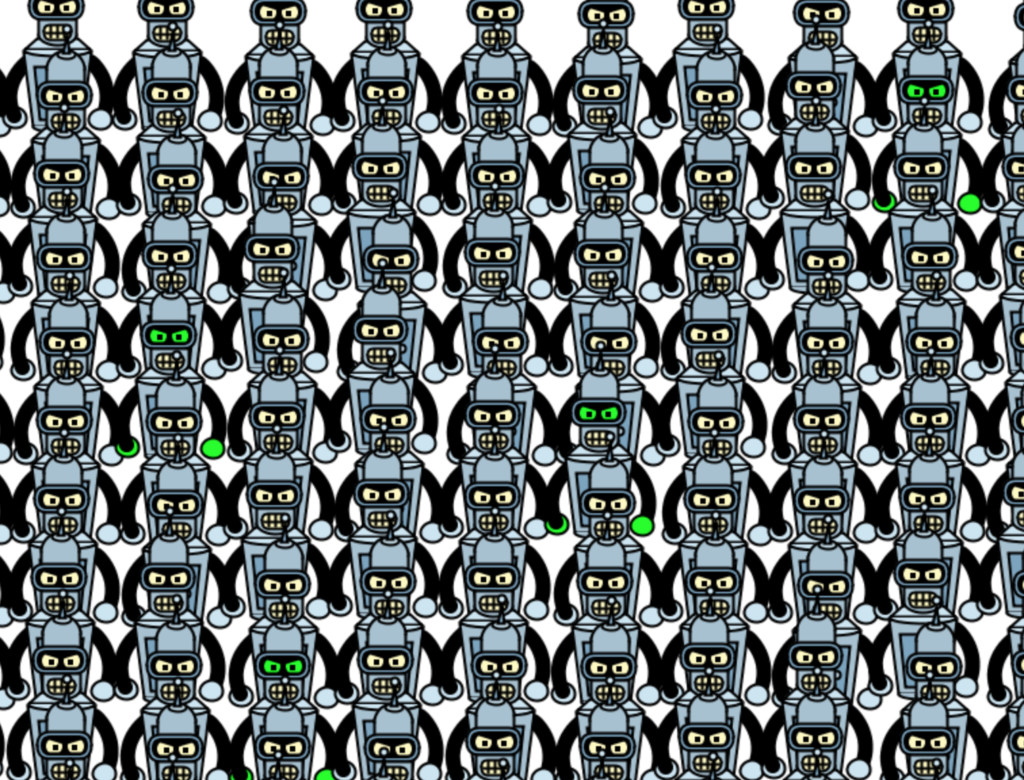
Raquel Clement 
Sérgio Magellan 
Sonia Novais