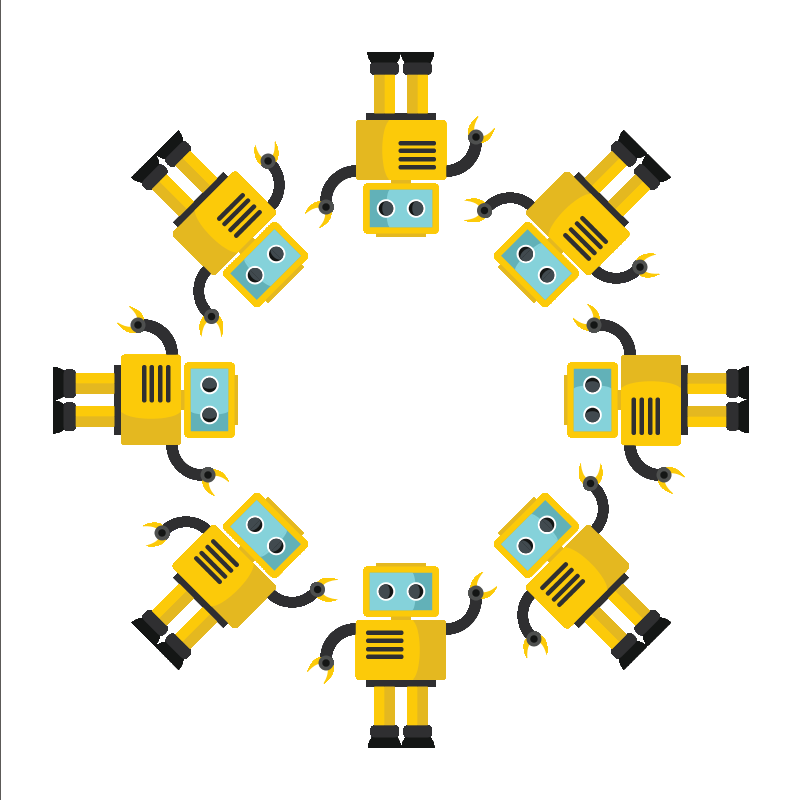
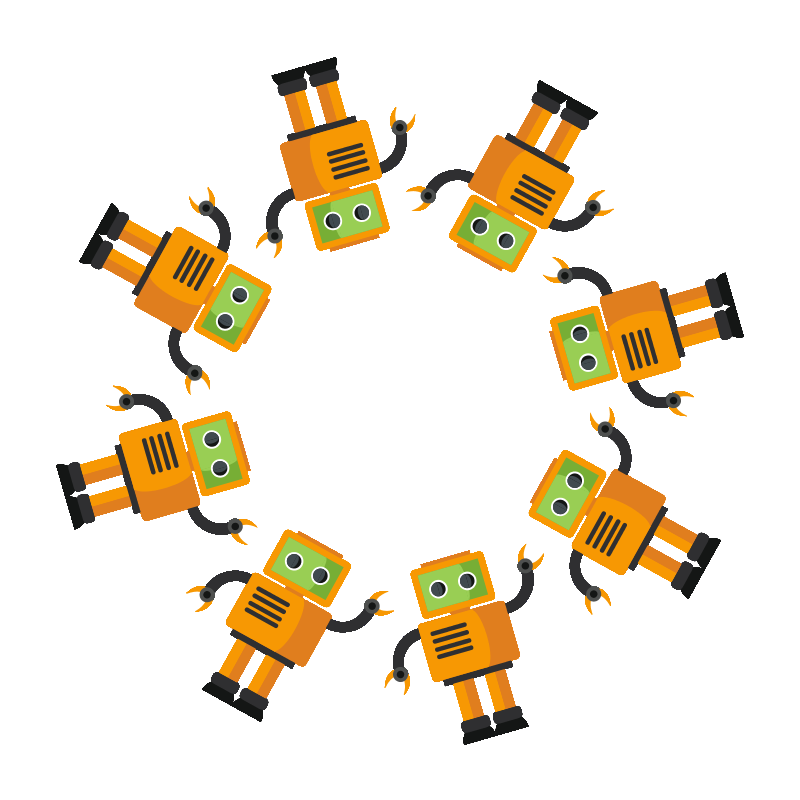
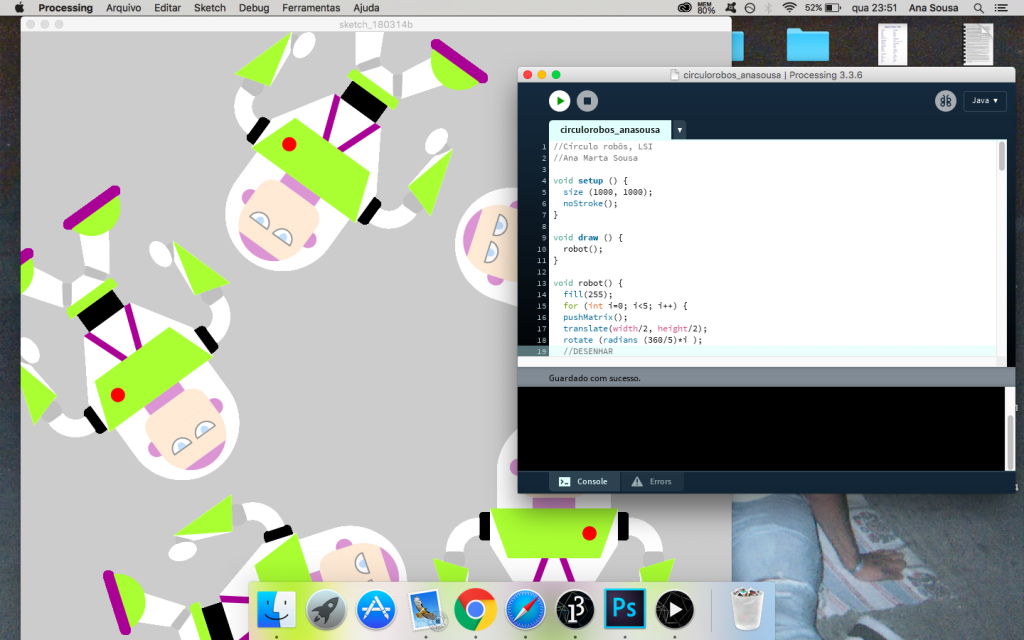
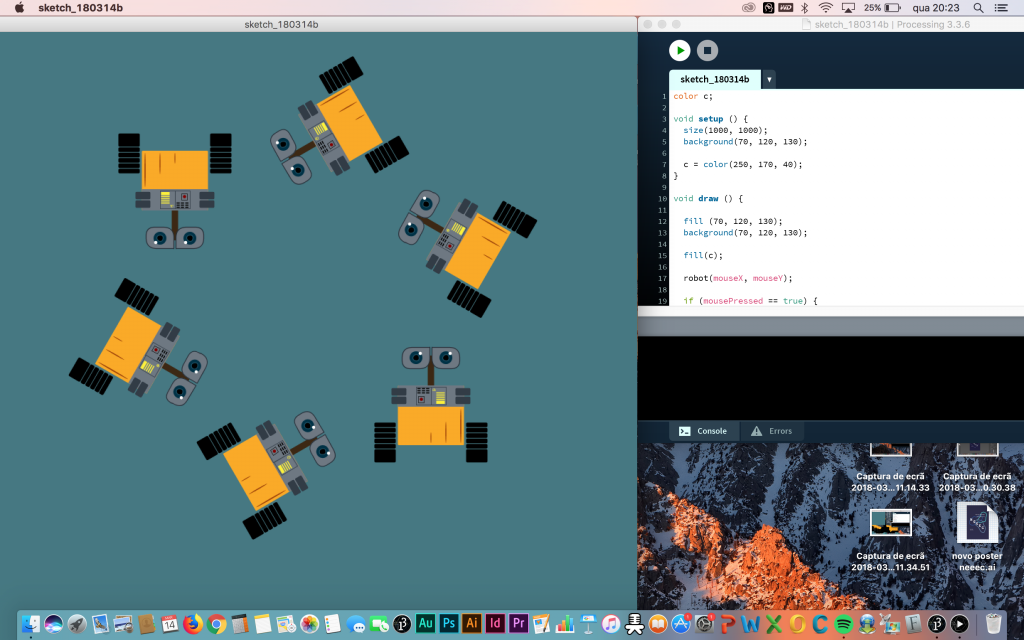
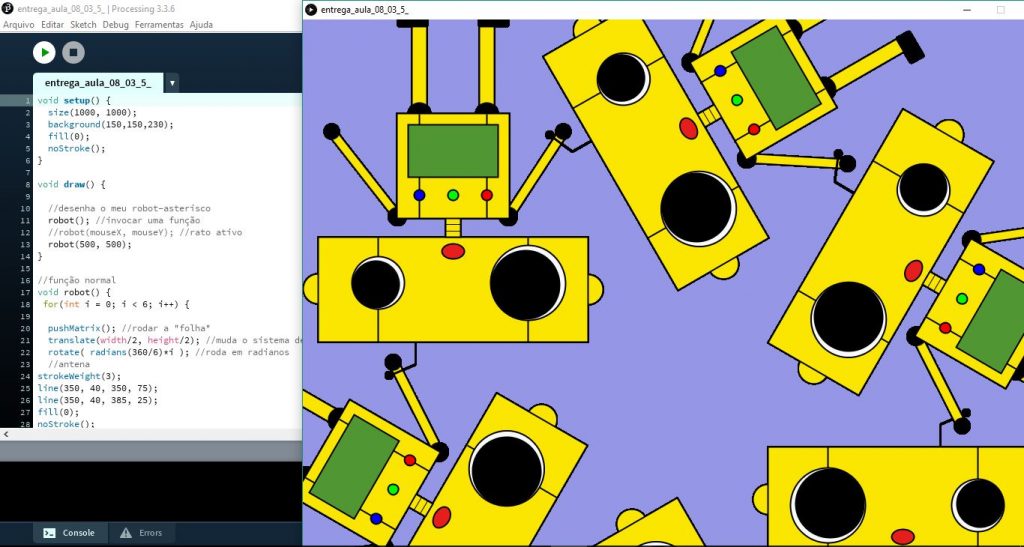
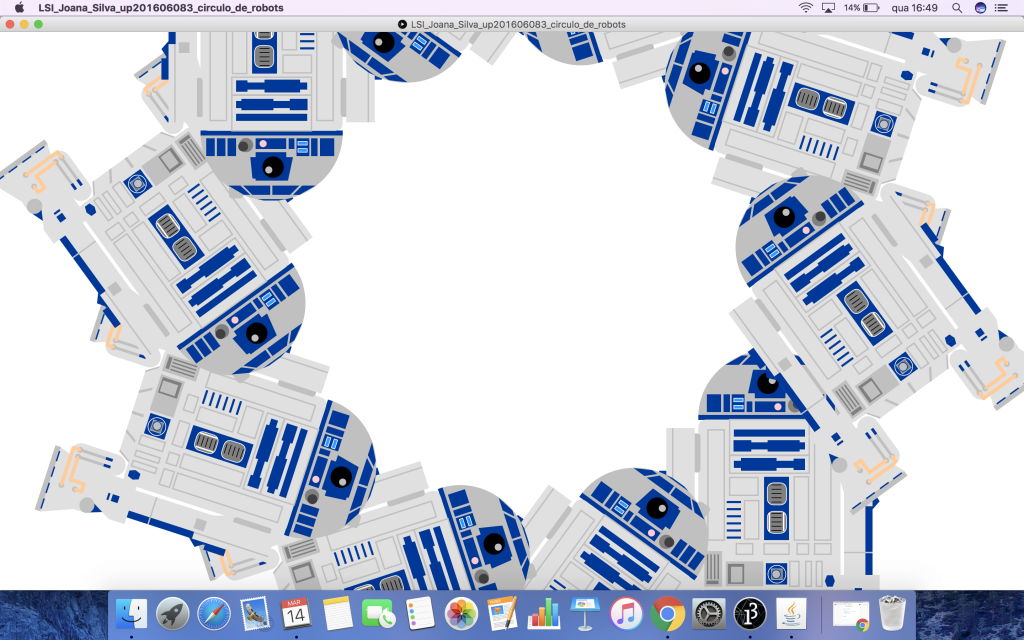
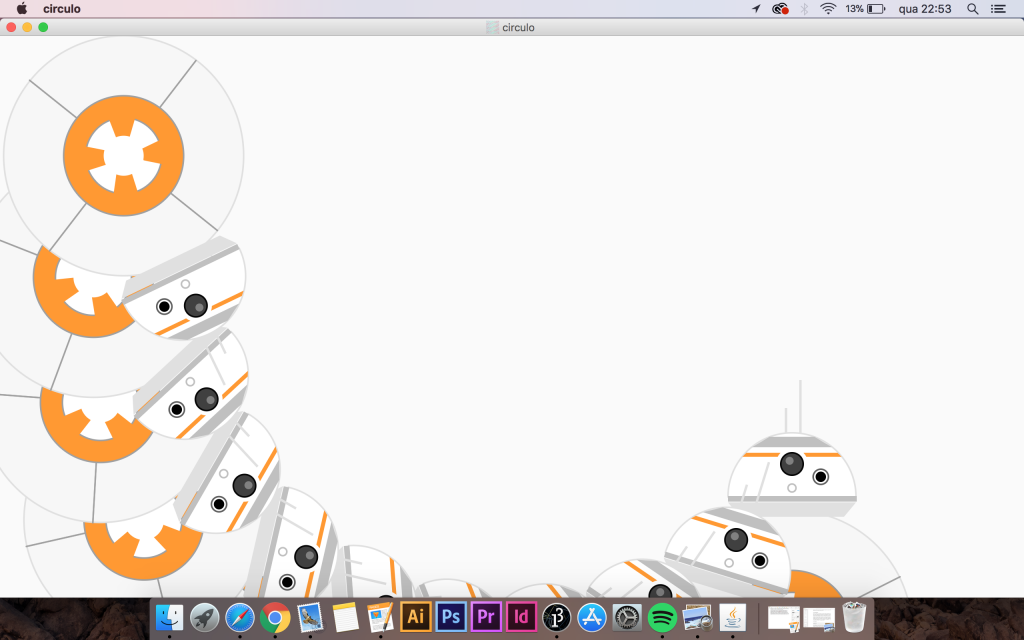
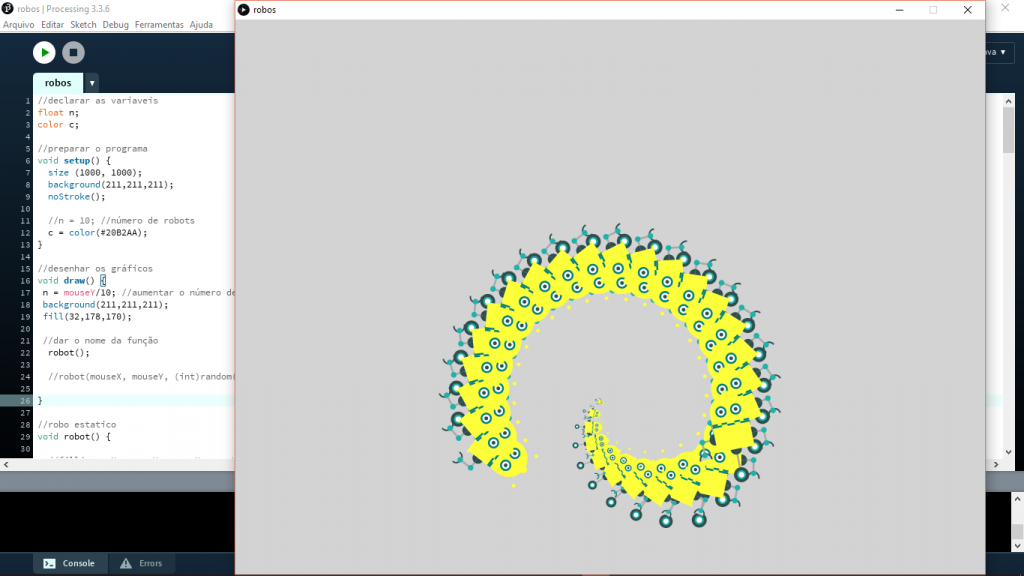
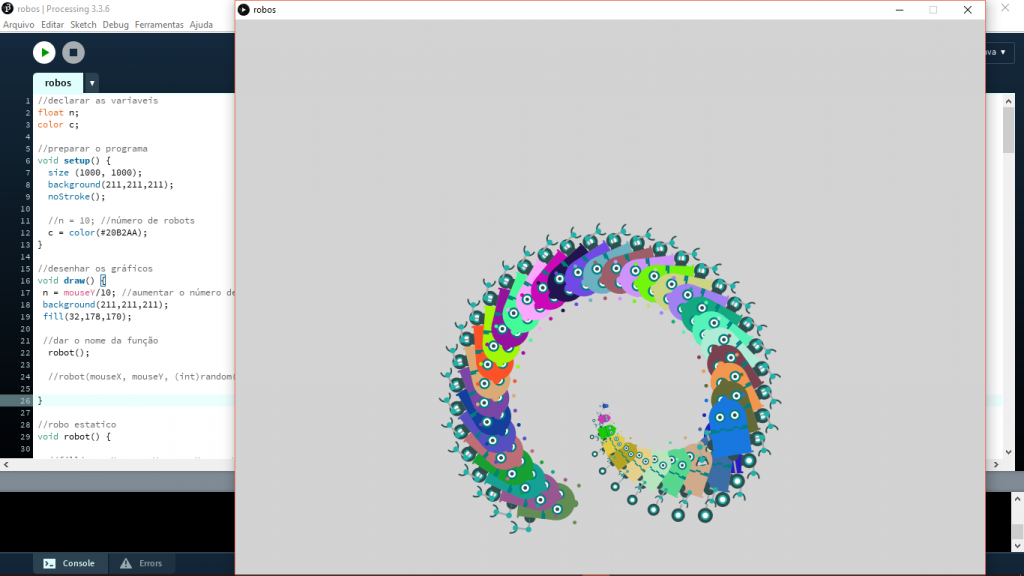
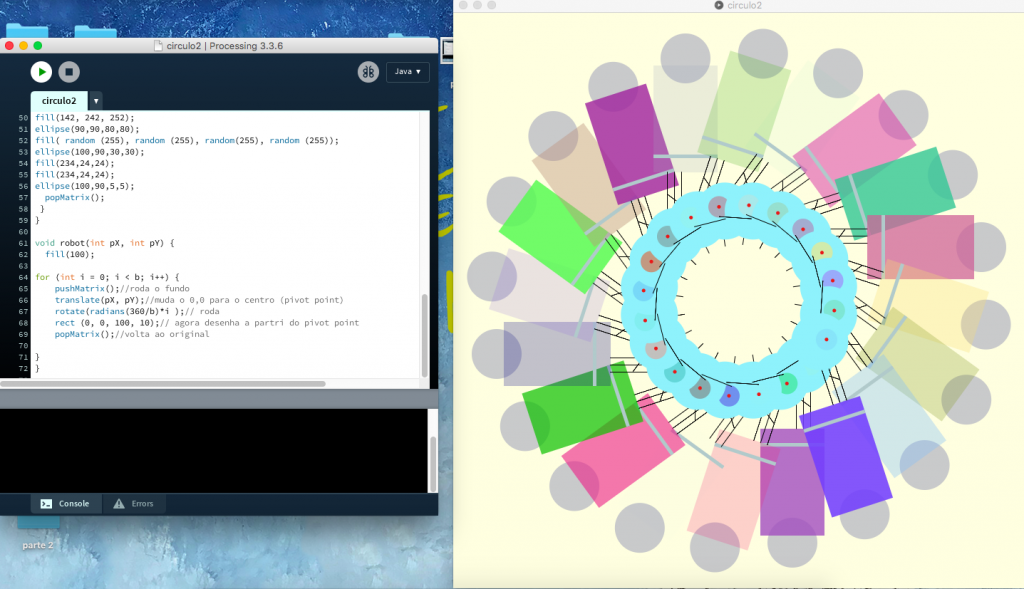
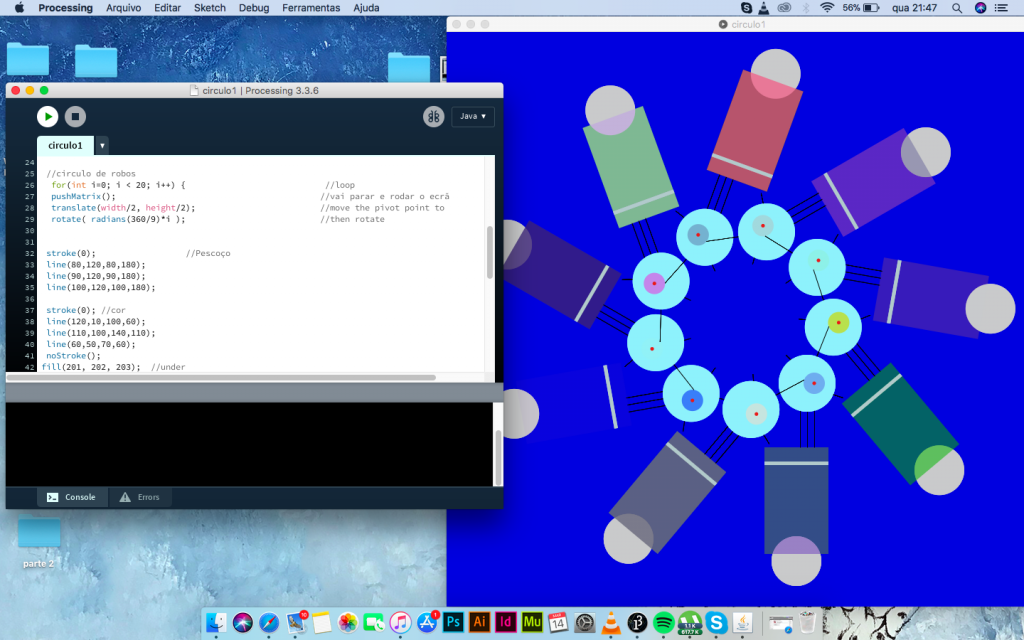
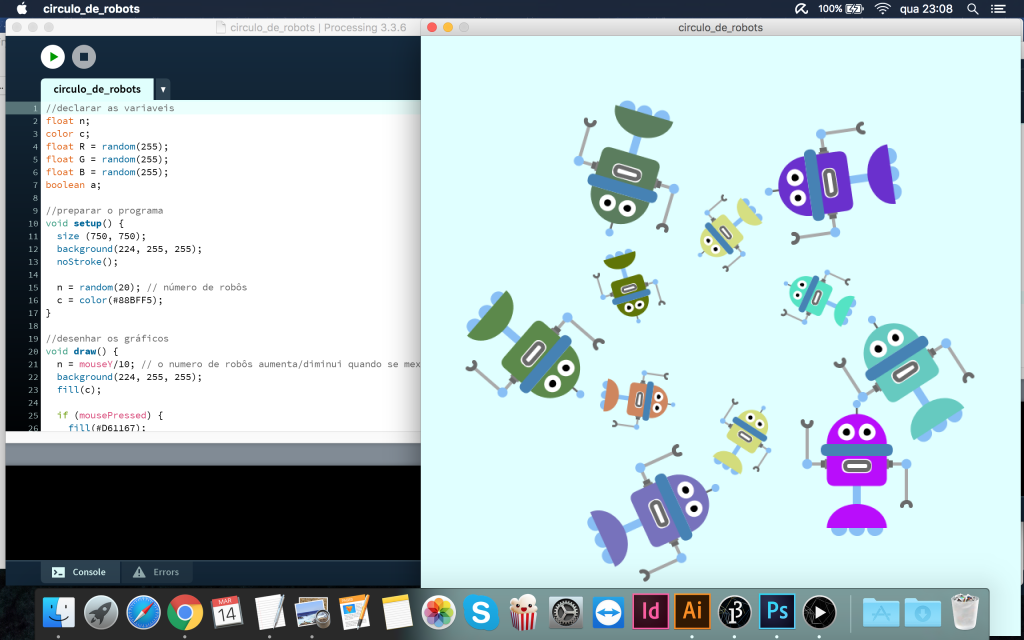
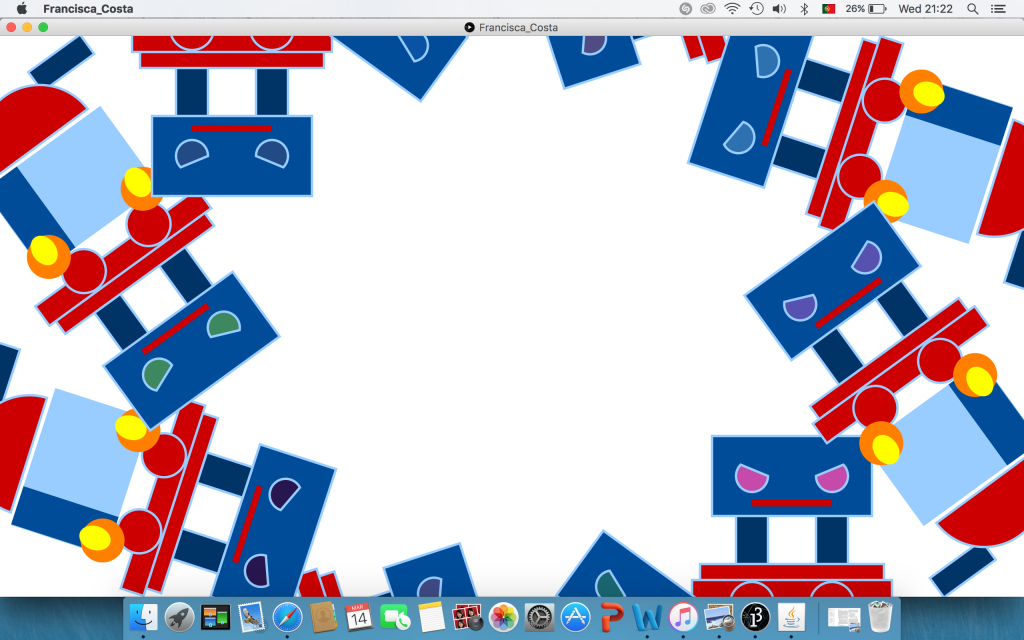
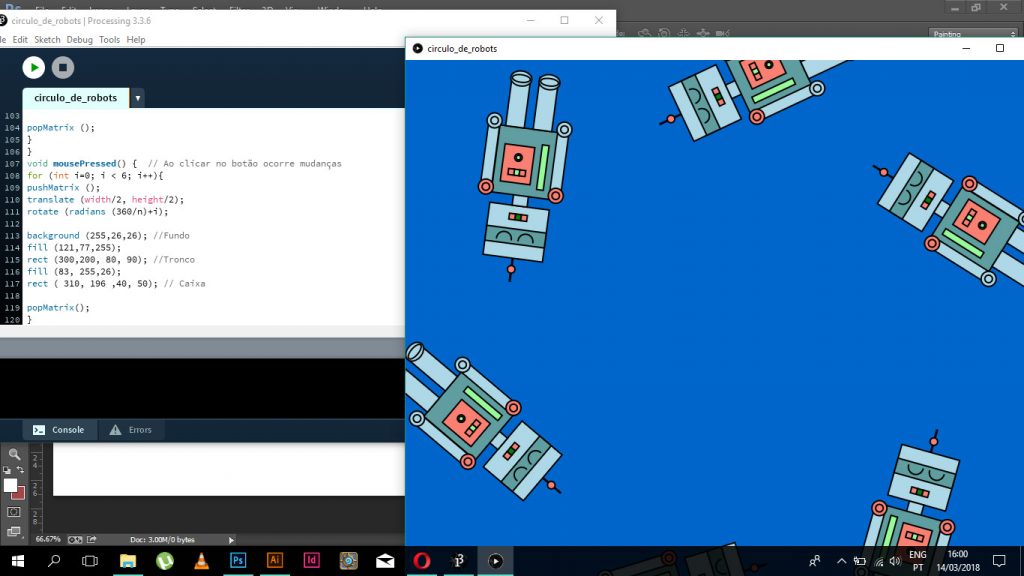
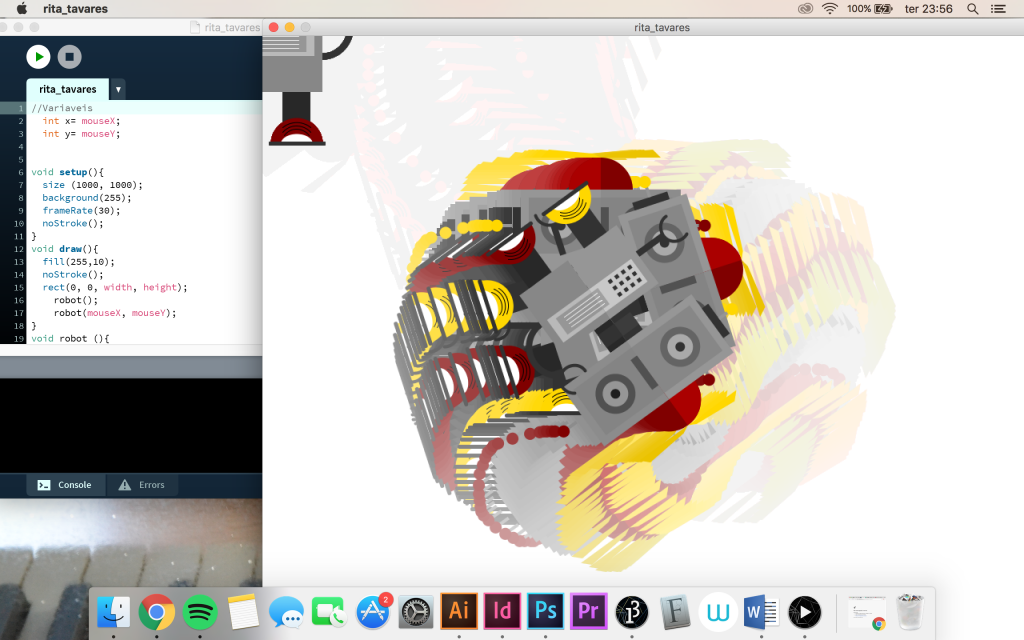
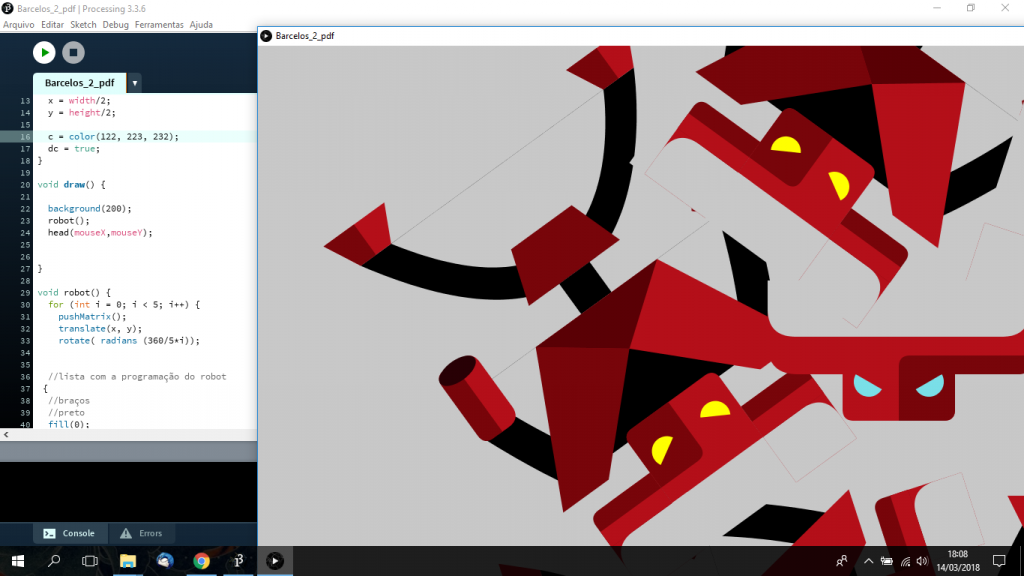
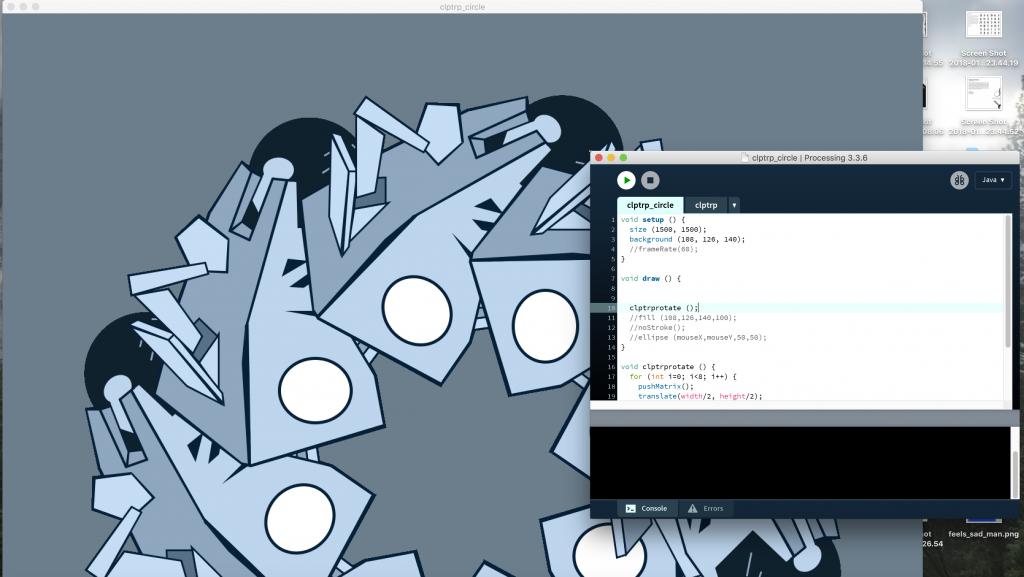
Like last year, in the transition between static mode and processing dynamic mode, students were challenged to pass their robots to a parameterizing/ada function and create robot circles around the cursor.
Here are some examples from 2018 (credits in file names):